第十八届中国(济南)国际信息技术博览会
时 间:2026-10-23-2026-10-25
地 点:济南舜耕国际会展中心
时 间:2026-10-23-2026-10-25
地 点:济南舜耕国际会展中心
 产品介绍
产品介绍
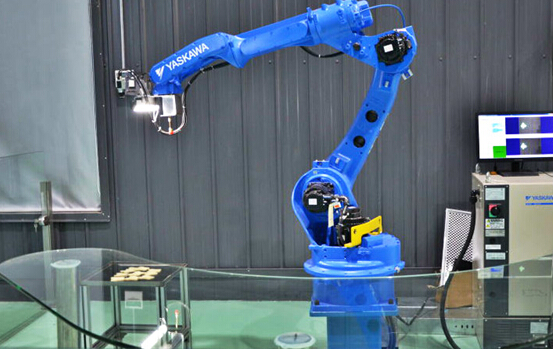
通过机器人载动相机对料盘中的工件进行拍照,两张图形信息经处理程序进行分析,将工件的3维位置及姿态传递给机器人。机器人根据位置信息将工件抓取,并将工件按一定规律排放在桌面上。与前面的视觉识别不同的是,机器人可以识别三维空间的位置(长宽高等数据)
机器人视觉在现代工业的应用越来越广范。工件在杂乱摆放的情况下,仍然可以识别抓取,在工业自动化上有很大的使用空间。
“丞华展览”隶属于丞华企业集团,是1999年经山东省工商局首家注册的经营会议和展览服务机构,专业从事大型展览、博览会和大型政府
展览业务部:
0531-88879887 86512559 81219080
观众组织部:
0531-88879901
